
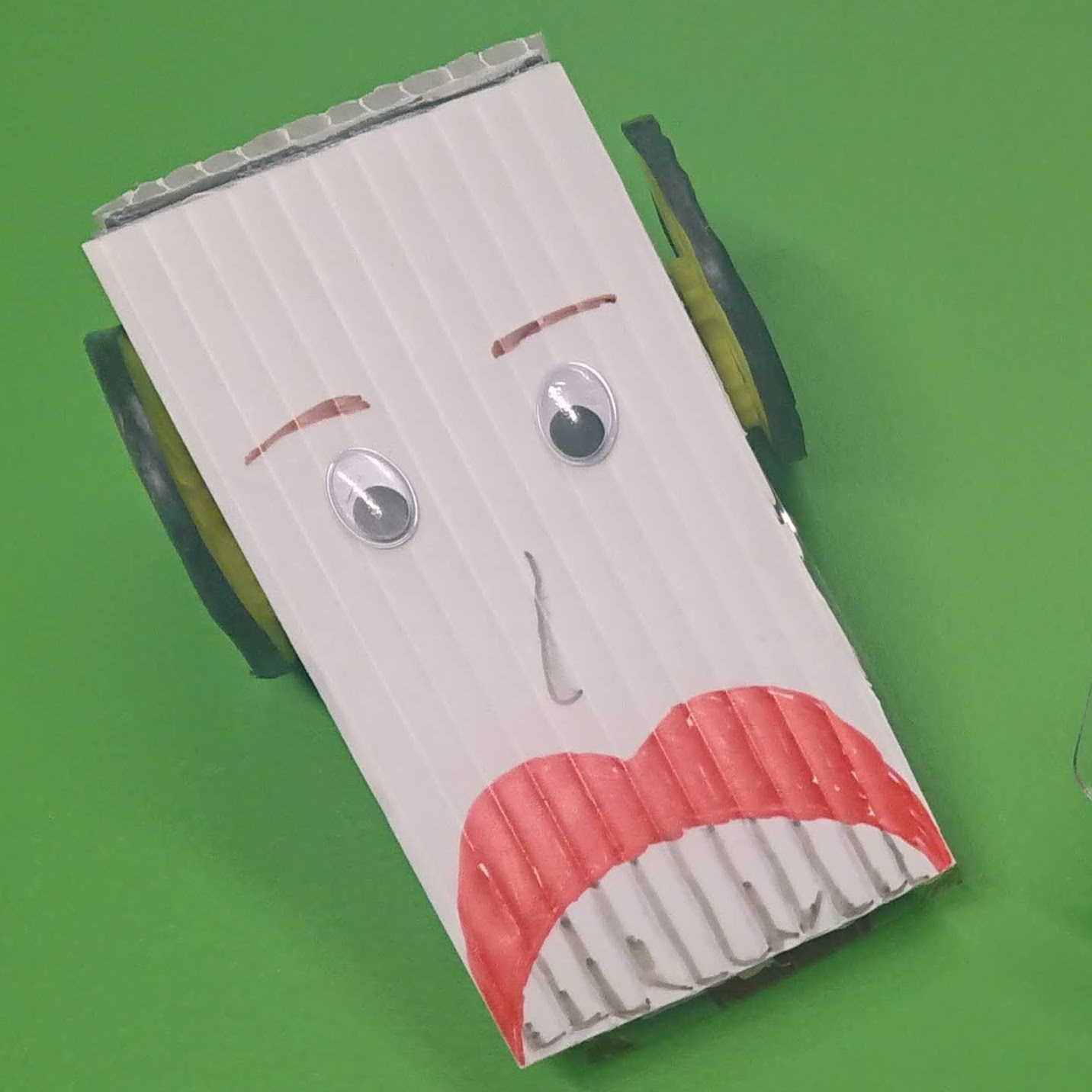


Eyesorasaurus
Eyesorasaurus, an invertible flipper, debuted at AWS55 (Dunchurch). After this competition, I redesigned the chassis to use smaller wheels, for a more compact robot, and brought it to AWS56 (Bristol). Unfortunately, the newly designed flipper that came with the new-look, didn't work as expected. For AWS57 (Tysoe) I fixed the issues with the flipper, but discovered a further problem with this design - the wheels were too small, meaning that slight variations in floor level made it impossible to drive. Having no time for a redesign, Eyesorasaurus took a break, and came back as v3.0 for AWS59 (Sheffield), sporting new glow-in-the-dark tires, and a more reliable flipper.
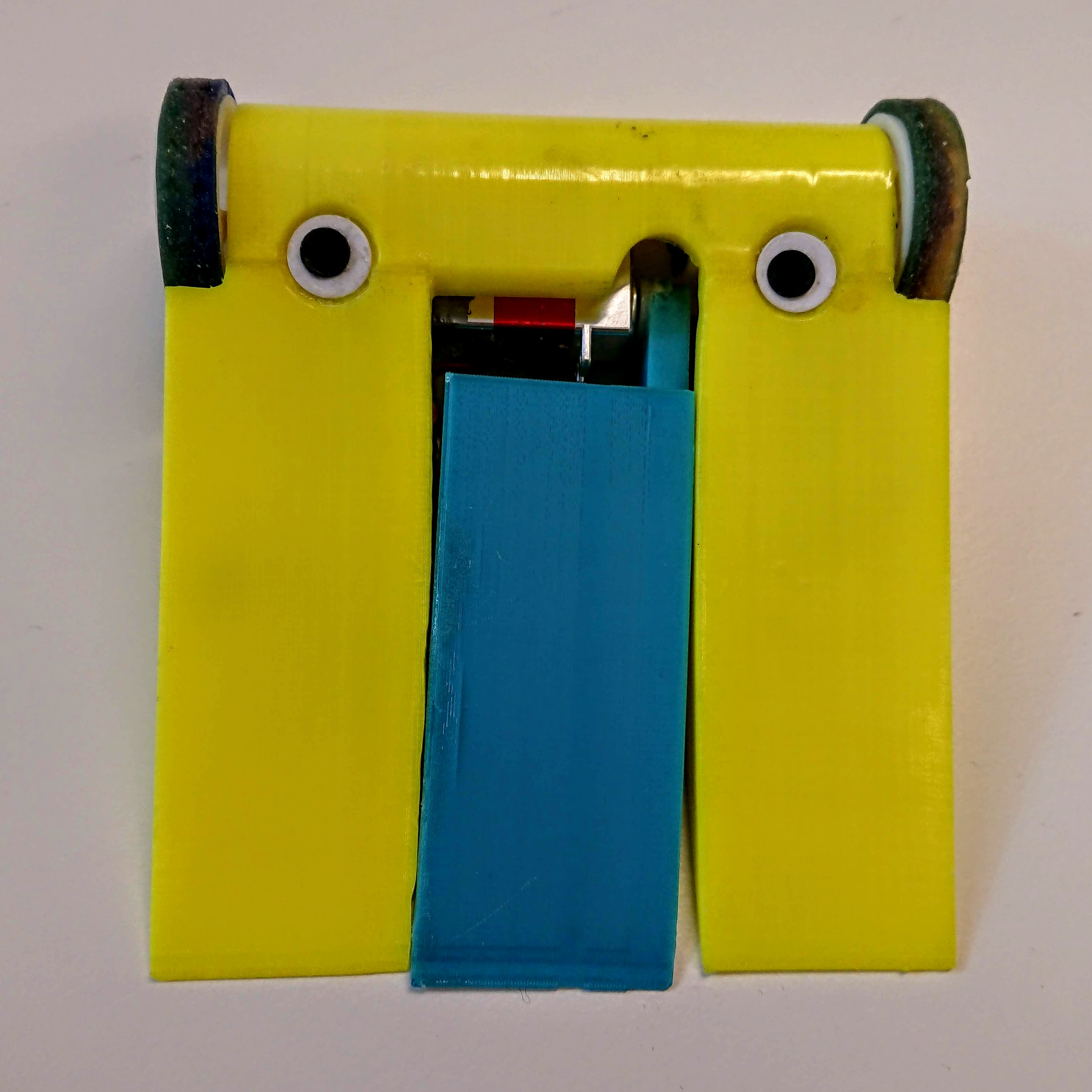
out-of-micro:trol
out-of-micro:trol, my oldest active robot, debuted at Antfreeze 5, where I entered it into the mini-games. I have brought it to every AWS since. It is not intended to be competitive - it fits almost exactly into the allowed 4" cube, and is made of junk. Controlled by a BBC micro:bit and an L9110s motor driver, its 'weapon' is a bright Neopixel face that changes expression to make opponents feel bad about hurting it.
Easy to beat in battle, but seemingly impossible to kill, the only changes made have been a switch for the battery, and a change (downgrade!) in wheels when the originals got too damaged.
The code for the BBC micro:bit in the robot and the controller are on GitHub.
Tik-Tok
I debuted Tik-Tok at AWS55 (Dunchurch) and it competed at every AWS unchanged until AWS59 (Sheffield). For this event, I reduced the weight in the chassis and components, so that I could make the grabbers more grabby! I am not sure whether this was successful or not, but it didn't make anything worse, so v2.0 is here to stay.
My main challenge with this robot was the grabbing mechanism - to fit all of the pieces in the required space, whilst allowing the robot to drive inverted, I had to design a right-angled gearing mechanism. This isn't perfect, but it works more-or-less as expected, and the files for v1.0 are on Thingiverse.
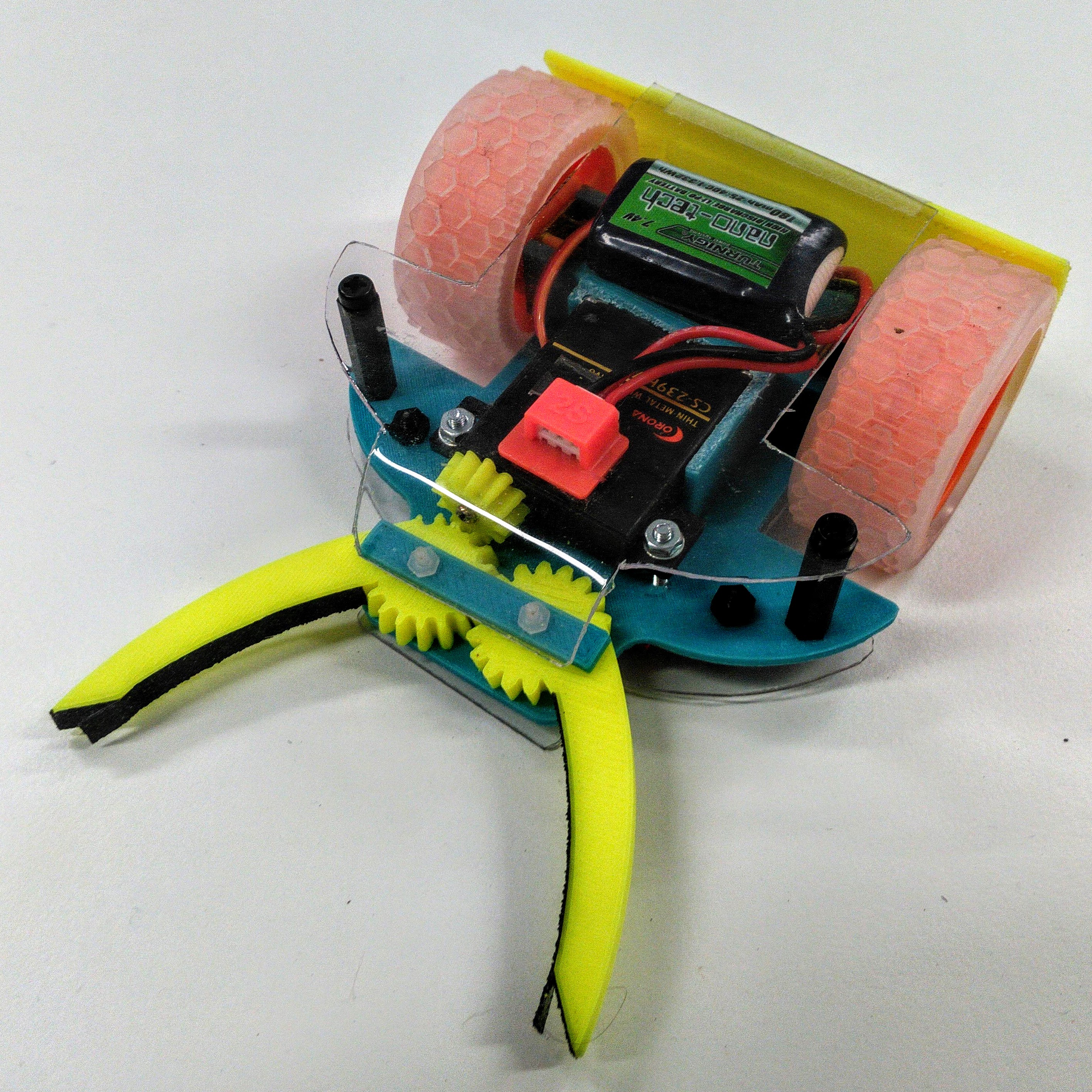
micro:bite (semi-retired)
For Science Oxford, the charity I work for, I designed a BBC micro:bit Antweight PCB to use with young people in Oxfordshire and Buckinghamshire. Before ordering a full set of boards, I needed to thoroughly test the design. So micro:bite was born.
I used the PCB, plus all of the components I would use with the young people, to make the drive system. I then added a servo weapon - it was originally going to be a flipper, but the servo was not strong enough, so it became a 'biter' instead. The body was made from materials I had handy at work, and therefore what my future builders would have easy access to.
The power regulation needed to control the servo (it needed 5V, the drive system used 3.8V) made it into v3 of the PCB, and I was able to test the robustness of the drive system.
micro:bite debuted at AWS58 (Dunchurch). It was not very successful during the competition, but that's the fault of my design and driving! The electronics all worked as expected. The board design and coding information can be seen on Science Oxford's micro-ant site.
Wedge-in-Denial (retired)
Wedge-in-Denial was my first attempt at robot building, entered into Antfreeze 5. Not wanting to spend the money on real parts until I knew whether I would continue, I borrowed an old transmitter (with a massive receiver!) from a friend, and used an arduino as the motor driver. I was new to everything, so as well as learning CAD for the first time, I had weight-balancing issues, my wheels were too big so it drove way too fast, and my arduino code was suspect to say the least.
Despite all the issues, building my first robot, and taking it to an event, was enough to make me want more. Wedge-in-Denial is retired, but the lessons learnt from this first build were invaluable.
Untitled Spinner (under construction)
Currently in the CAD stage... a full-body-undercutter!
While I don't expect this to be very successful, it's a fun design challenge. Never having used metal for robots before, this is the first time I need to do all of my prototyping in different materials to the final design.